
Executive Director of Boston Dynamics AI Institute, founder of Boston Dynamics
Marc Raibert
Profile
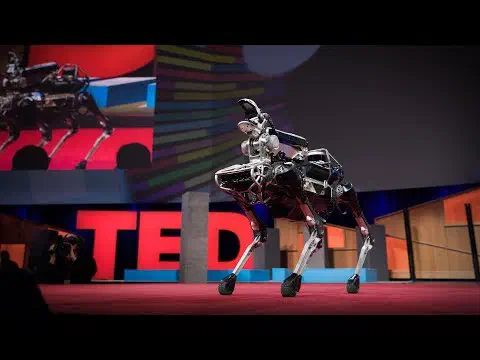
Marc Raibert is the closest thing robotics has to a founding father of dynamic legged locomotion. Before him, robots that walked on legs mostly shuffled along in careful, statically-stable poses — balanced at every instant, moving like nervous grandparents. Raibert made them run. Starting with the MIT Leg Lab in the 1980s (after founding it at CMU in 1980), he showed that a single leg could hop, balance, and recover using a few physics-based control laws. Everything you associate with modern robot athletics — the parkour, the backflips, the eerie ability to stay upright when kicked — descends from that work.
In 1992, Raibert spun his lab out into Boston Dynamics, which spent the next three decades turning research demos into production robots. BigDog (DARPA-funded pack mule), Atlas (the humanoid doing gymnastics routines that keep going viral), Spot (the quadruped you can actually buy), and Handle (the warehouse wheel-legged bot) all trace back to him. Boston Dynamics was passed through Google, then SoftBank, then acquired by Hyundai Motor Group in 2020. Raibert stepped back from CEO in 2019, handing the role to Robert Playter, and now serves as chairman.
His current focus is the Robotics and AI Institute (formerly the Boston Dynamics AI Institute), launched in 2022 with an initial $400M+ commitment from Hyundai. The Institute is his swing at the next problem: the hardware works, but the robots are still dumb. Raibert wants to marry the athletic control stack Boston Dynamics perfected with modern AI — foundation models, learned policies, cognitive reasoning — so that robots can decide what to do, not just execute scripted routines.
For developers learning AI, Raibert is the reminder that embodied intelligence is a different beast. The humanoid race now includes Tesla Optimus, Elon Musk’s project, Brett Adcock’s Figure, and a long tail of startups — but all of them are building on top of engineering problems Raibert’s team solved decades ago. LLMs are easy compared to making a 150kg robot land a backflip.
Books
Key Articles & Papers
Legged Robots Experiments in Balance with a 3D One-Legged Hopping Machine Q&A: Marc Raibert on the Boston Dynamics AI Institute Boston Dynamics founder shows off robots while institute cranks on AI Marc Raibert: Boston Dynamics and the Future of Robotics (Lex Fridman #412 transcript)Spotify Podcasts

![#412 - [Traducido con IA] Marc Raibert: Boston Dynamics y el futuro de la robótica](/images/people/marc-raibert/spotify/0RYmTNZz1CA7BZQSzYXcsM_hu_4bcdf075950aa55e.webp)




YouTube